ハードウェアのセットアップを行う
Note
パルス入出力ボードのセットアップ方法を説明します。 スタートアップガイドを参照して Raspberry Pi と拡張 I/F ボードの重ね付けまで実施済みの場合は、「ターゲットと接続する」から進めてください。
禁止
🚫 「外部電源を入力する」の手順までは電源を入れないでください。
スペーサを設置する
Raspberry Pi と AM-PIO を重ね付けする際は、安定させるためにスペーサーを設置します。 特に端子台の場合は高さがあるため、スペーサーで調整し、それぞれが干渉しないようにしてください。
アドレスを設定する
お使いの環境に合わせて、拡張 I/F ボードの SPI アドレス (GPIO ピン番号) は変更する必要があります。アドレスが重複しないように設定してください。(TestRunner からはアドレス指定で制御するため、こちらで設定したアドレスをアプリから指定します。)
SPI アドレス
SPI アドレスは初期状態では 8 (JP3 ショート) に設定されています。 基板の表面にある半田ジャンパー (JP3~JP6) の実装を変更することにより SPI アドレス (GPIO ピン番号) を変更できます。
詳細はハードウェアマニュアルを確認してください。
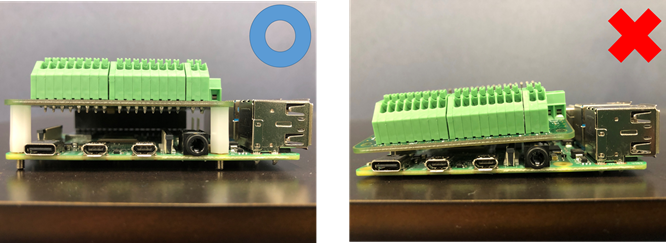
Raspberry Pi と拡張 I/F ボードを重ね付けする
Raspberry Pi と AM-PIO を干渉しないように気を付けながら重ねます。以降はこの重ね付けした状態のものを “TestUnit” と呼びます。
※写真は RPi-GP10 での例です。
ターゲットと接続する
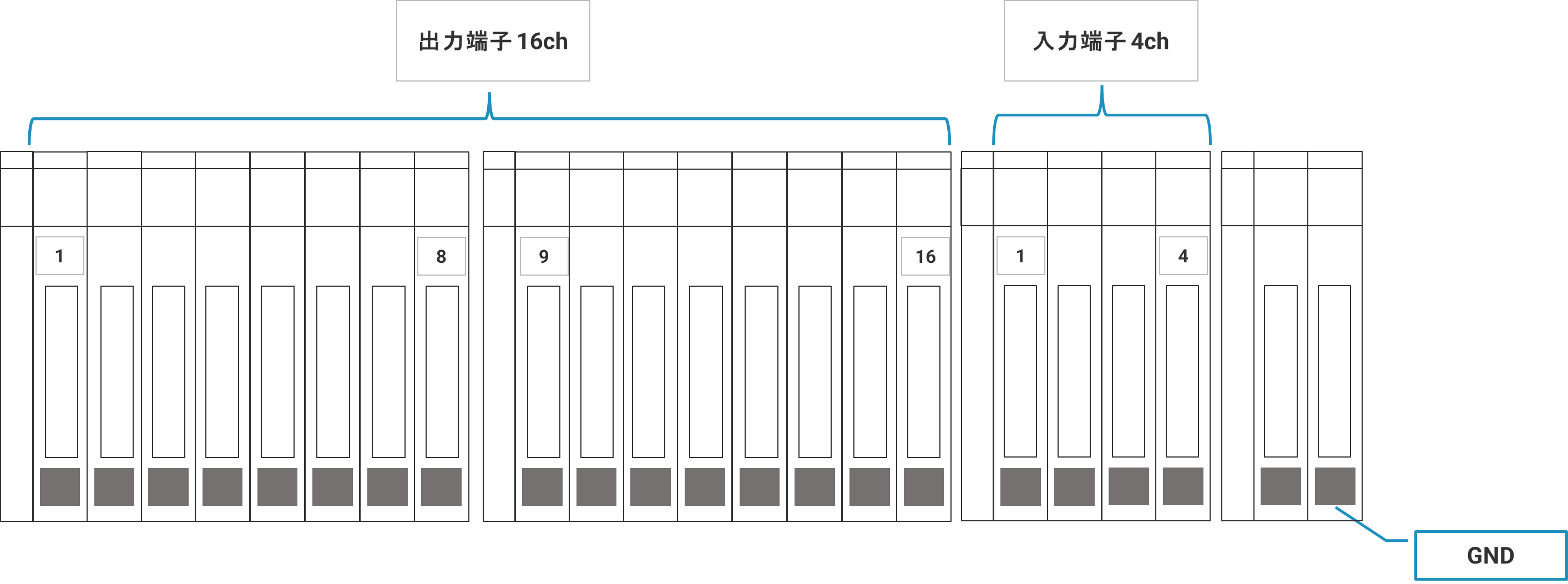
TestUnit とターゲットをコネクタやジャンパ線を用いて接続します。 出力 (制御) 4ch、入力 (計測) 16ch が使用可能です。 ターゲット側の制御 / 計測したいピンと TestUnit をピン配列を参考にしながら接続してください。 詳細はハードウェアマニュアルを確認してください。
Note
GND も忘れずに接続してください。
端子台
MIL コネクタ
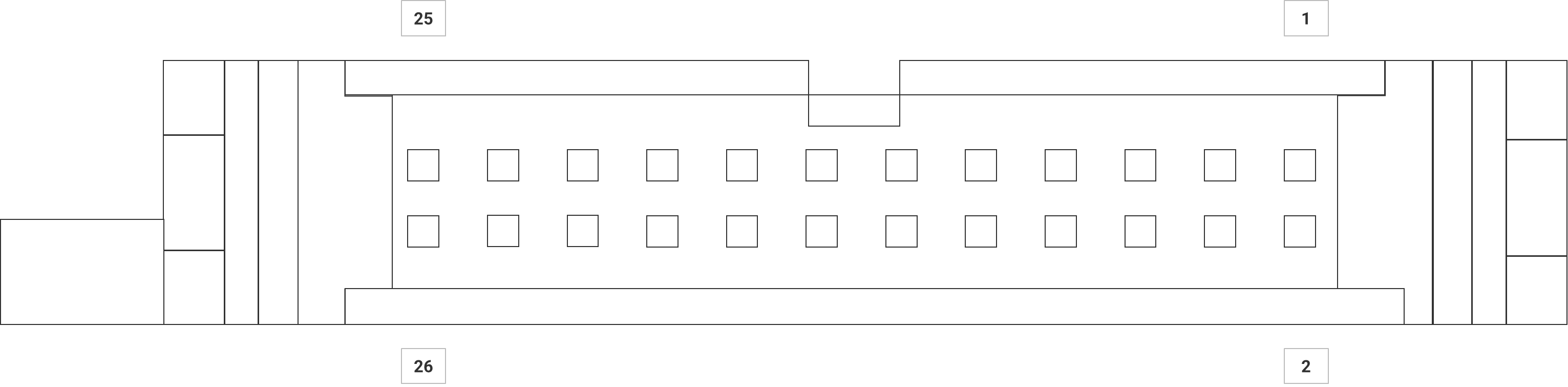
MIL コネクタのピン配列と機能は以下です。 (カッコ内の ch はアプリケーション上の表示を示します)
| PIN# | 説明 | PIN# | 説明 |
|---|---|---|---|
| 1 | GND | 2 | GND |
| 3 | VDD | 4 | VDD |
| 5 | 未使用 | 6 | 未使用 |
| 7 | パルス出力 ch4 | 8 | パルス出力 ch3 |
| 9 | パルス出力 ch2 | 10 | パルス出力 ch1 |
| 11 | パルス入力 ch16 | 12 | パルス入力 ch15 |
| 13 | パルス入力 ch14 | 14 | パルス入力 ch13 |
| 15 | パルス入力 ch12 | 16 | パルス入力 ch11 |
| 17 | パルス入力 ch10 | 18 | パルス入力 ch9 |
| 19 | パルス入力 ch8 | 20 | パルス入力 ch7 |
| 21 | パルス入力 ch6 | 22 | パルス入力 ch5 |
| 23 | パルス入力 ch4 | 24 | パルス入力 ch3 |
| 25 | パルス入力 ch2 | 26 | パルス入力 ch1 |
外部電源を入力する
TestUnit の起動には外部電源の入力が必要です。 起動には 1 分程度かかります。 TestUnit が正常に起動すると、PWR LED (赤) が約 1 秒周期で点滅します。
ハードウェアのセットアップができたら、プロジェクトの設定を行う に進みます。