AUTOmeal について
このページでは AUTOmeal 全体の仕様および制限事項について説明します。
スタートアップガイド、チュートリアルも参照のうえ使用してください。
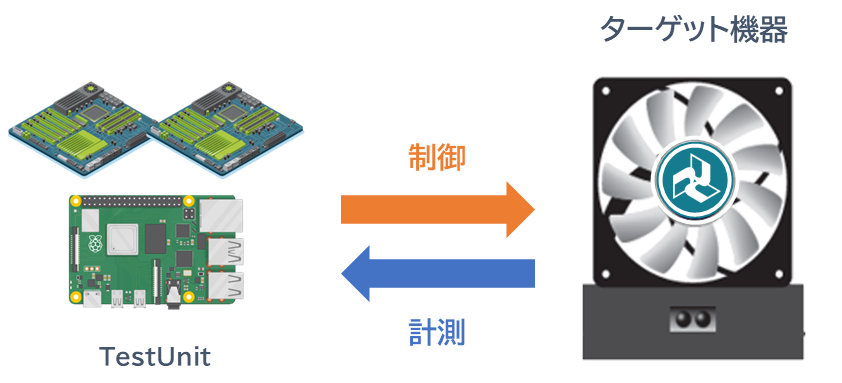
制御・計測
TestUnit が出力を行うことを ”制御”、TestUnit に対する入力の記録を ”計測” としています。
制御は TestRunner からの制御命令によって行われます。
TestUnit が制御命令を受け付け次第実行され、実行間隔の調整は行われません。
複数の制御指示を送った場合、TestUnit が受け付けた順に最短時間で実行されます。
制御命令の実行分解能は 10 ms です。10 ms 以上の間隔をあけて操作を行ってください。
計測は Raspberry Pi のタイマーによって 10 ms 周期で行われます。
10 ms ごとにすべての拡張 I/F ボードに対して計測命令が実行されます。
複数枚の拡張 I/F ボードを使用する場合、最初と最後の計測には数 ms の時間差が存在します。
また、1 周期内での計測順は順不同となります。
拡張 I/F ボード
拡張 I/F ボードは組み合わせに依らず、最大 8 枚まで使用可能です。
- ロジック入出力 (RPi-GP10)
- ロジック入出力 (CPI-DIO-0808L)
- アナログ出力 (AM-AO)
- アナログ入力 (CPI-AI-1208LI)
- パルス入出力 (AM-PIO)
- リレー制御 (CPI-RRY-16)
パルス入出力のみ、同一種類は最大 4 枚までとなります。
シリアル通信
シリアル通信は PC の COM ポートを使用し、シリアル ⇔ USB 変換ツールにより通信を行います。
Note
シリアル ⇔ USB 変換ツールは別途用意していただく必要があります。
シリアル通信は UART 通信のみ対応しています。
シリアル通信は 8 ポートまで同時に通信可能です。
CAN 通信
CAN 通信は市販の CAN ⇔ USB 変換ツールを使用して行います。
Note
CAN ⇔ USB 変換ツールは別途用意していただく必要があります。
CAN ⇔ USB 変換ツールは最大 4 台まで接続して CAN 通信を行うことが可能です。
対応ツール
AUTOmeal では下記の CAN ⇔ USB 変換ツールを使用できます。
| メーカー | 製品名 型番 |
CAN FD 対応 | 備考 |
|---|---|---|---|
| Vector | VN1610 | ○ | |
| Vector | VN1630A | ○ | 4ch モデルの場合でも使用できるのは ch1,2 のみ。 |
| PeakSystem | PCAN-USB | × | |
| PeakSystem | PCAN-USB FD | ○ |
対応ドライバ / ライブラリ
AUTOmeal では下記のドライバ / ライブラリで動作確認を行っています。
バージョンが異なる場合、正常に動作しない可能性があります。
| メーカー | ライブラリ | バージョン |
|---|---|---|
| Vector | Vector Driver | 25.40.1 |
| Vector | XL Driver Library | 25.20.14 |
| PeakSystem | PCANBasic | PCAN-Basic API 5.x |
AUTOmeal での対応
| 項目 | 対応 | 備考 |
|---|---|---|
| Classic CAN | 〇 | 最大 1 Mbps まで任意のボーレートを選択可能です。 |
| CAN FD | 〇 | ツールごとに対応 / 非対応範囲が異なります。 |
| 拡張フォーマット | 〇 | ID サイズを 11 bit / 29 bit から選択可能です。 |
| エラーフレーム オーバーロードフレーム |
× | 使用する変換ツールに依存します。任意のタイミングで送信することはできません。 |
| 規格対応 | × | 特定の規格対応を補助する機能はありません。 |
UDP 通信
UDP 通信は PC のネットワークインターフェースを使用して行います。
UDP 通信は最大 8 つのエンドポイントまで同時に通信可能です。
UDP 通信ではマルチキャスト通信に対応しています。
TCP Client 通信
TCP Client 通信は PC のネットワークインターフェースを使用して、TCP サーバーへのクライアント接続を行います。
TCP Client 通信は最大 8 つのクライアント設定まで同時に通信可能です。
MG400 ロボットアーム制御
MG400 ロボットアームとは TCP/IP 通信を行い、制御および状態取得を行います。
Note
MG400 は別途用意していただく必要があります。
対応バージョン
AUTOmeal では下記のバージョンで動作確認を行っています。
バージョンが異なる場合、正常に動作しない可能性があります。
| 項目 | バージョン |
|---|---|
| DobotStudio Pro | v2.8.3-x86-64-stable.202411051509 |
| コントローラファームウェア | v1.7.0.2-stable-f5bd256-2405311035 |
| サーボファームウェア | 3.0.10.0 |
Connected VD® との連携
Connected VD® との連携機能を使用することで、AUTOmeal から Connected VD® を制御し、判定を行うことが可能です。
Note
Connected VD® は別途用意していただく必要があります。
Connected VD® を AUTOmeal から制御するために、Connected VD® のインストールフォルダを環境変数の PATH に追加してください。
対応バージョン
AUTOmeal では下記のソフトウェア/ライブラリで動作確認を行っています。
バージョンが異なる場合、正常に動作しない可能性があります。
| ソフトウェア/ライブラリ | バージョン |
|---|---|
| Connected VD® | 1.1.1 |
| CEC_VD_Library.dll | 1.1.1 |
テストの実行時間
AUTOmeal は長時間のテスト実行が可能です。
Note
AUTOmeal v2.0.0 では最長 24 時間の連続実行を可能としています。
注意
テスト実行時間が最長 24 時間を超えても、テストは自動で停止しません。 また、各種拡張 I/F ボード、シリアル通信、CAN 通信のいずれかで、テスト実行中に記録可能な最大レコード件数を超えた場合、以降はレコードの記録はスキップされます。 その際、最大レコード件数を超えたことを通知するメッセージ等は出力されません。